
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.png)
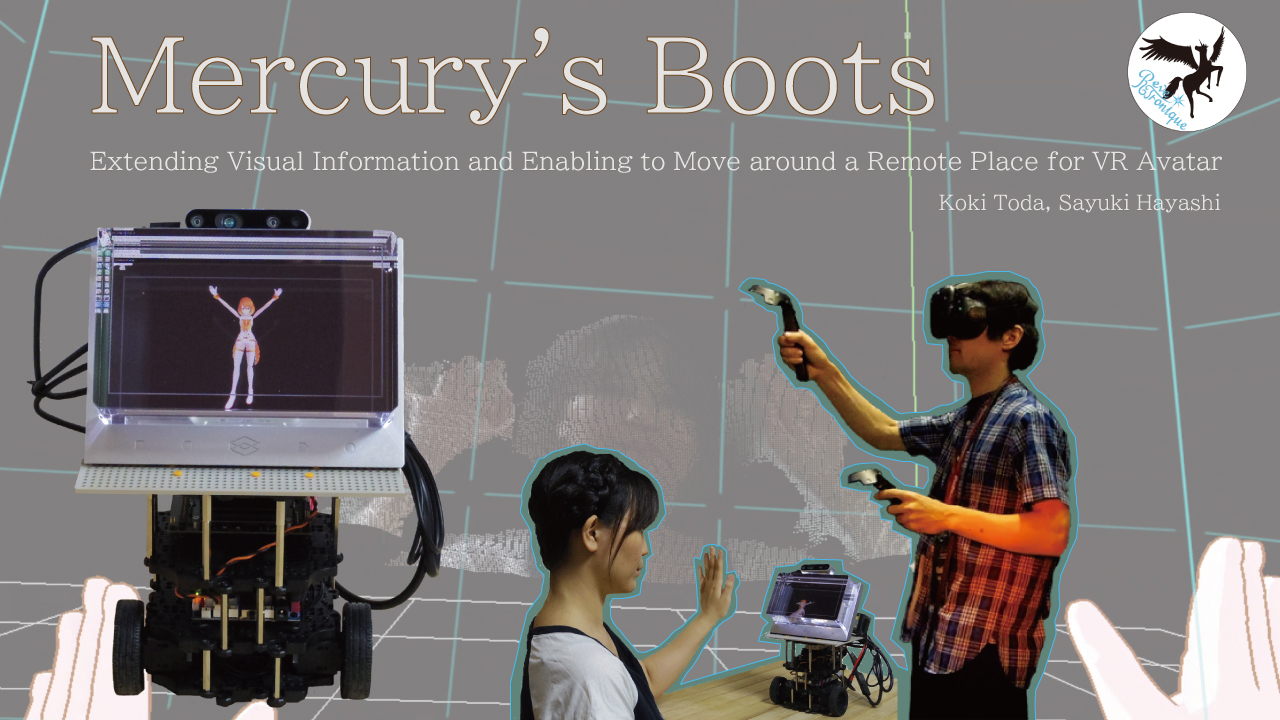
Mercury's Boots
Mobile Telepresence Robot for VR performer (character).
Summary
In this research, we develop a mobile telepresence robot displaying a light field image of the VR avatar synchronizing its posture to that of the VR performer and VR controlling application rendering a point cloud of the scene before the robot to the VR system with an RGB-D camera. Both our robot and application communicate with each other via WebRTC. Our remote communication system compresses depth data approximately 100kB, sends every about 200ms and decodes it for 20ms in average as the result of our performance test. In our online survey, 105 subjects generally expected our expecting effects, but some of them worried or suspected the limitation concerned to VR technology, network, or emotional expression of avatars.
Description
Year
2020
Size
W200 x H400 x D150 (mm)
Material
Jetson Nano, TurtleBot3, Looking Glass, Intel RealSense D435, VR Ready PC, VR HMD
Achivements
- HCI International 2020 (Online)